近年、インフラの老朽化が進む中で、限られた人材の中で効率的に点検する手段として注目されているのが「インフラ点検ロボット」です。高所・狭所・水中といった人が立ち入りにくい場所でも正確な点検が可能で、労災リスクや作業負担の軽減にもつながります。
とはいえ、事業者の立場からすると「どんな種類のロボットがあるのか」「どのように現場で活用できるのか」が分かりづらいという声も少なくありません。
そこで本記事では、インフラ点検ロボットの主な種類と活用方法をわかりやすく解説します。また、導入を検討している方に向けておすすめのインフラ点検ロボットメーカーも紹介するので、ぜひ参考にしてください。
▼この記事を読んで分かること
- インフラ点検ロボットとは
- インフラ点検ロボットの種類と活用方法
- 注目のインフラ点検ロボットメーカー5社
- インフラ点検ロボットの課題
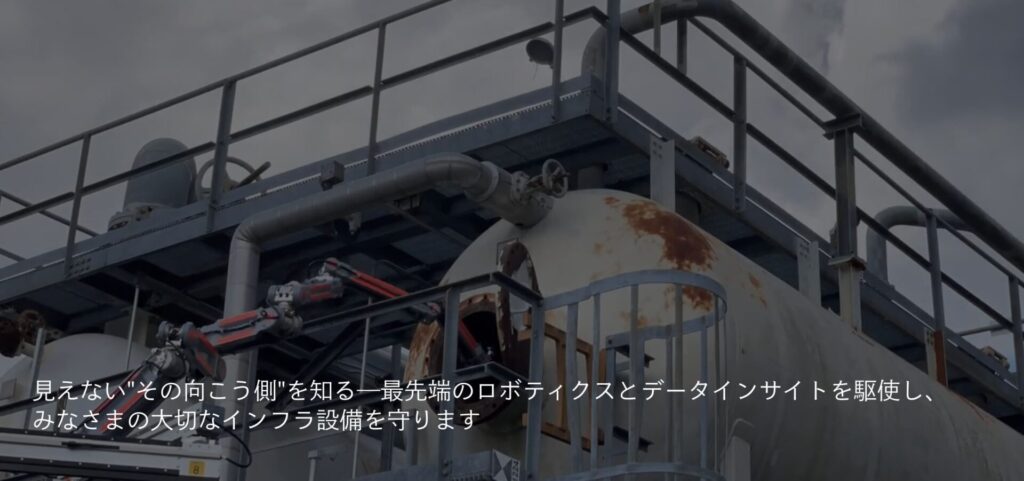
NBKマーケティングでは、hibot社と連携し、極限環境での点検作業を支援する高性能ロボット「Float Arm」を提供しています。Float Armは、人が立ち入りにくい危険な場所でも、安全に点検ができる多関節型点検ロボットです。特に定修(定期修繕)での配管の点検で活躍します。
人の目に代わる高精度カメラや各種センサーを搭載し、配管の肉厚測定・温度測定・3次元スキャンなども可能です。これまで熟練作業者が担っていた過酷な点検業務を、少ない人手で、高精度かつ記録も自動で残せるようにします。
ご関心のある方は、詳細資料をご確認ください。
インフラ点検ロボットとは
インフラ点検ロボットとは、橋やトンネル、配管、ダム、ビル設備などを、人に代わって検査や点検をするロボットのことです。
従来は作業員が高所や狭所、水中などに直接立ち入り、目視や打音検査で設備の劣化や損傷を確認してきました。しかし、近年は老朽インフラの増加と点検人材の不足を背景に、ロボットの活用が急速に広がっています。
インフラ点検ロボットを活用する大きなメリットは、人が入りづらい場所や危険な環境でも、安全かつ高精度な点検が可能な点です。また、点検作業の記録がデジタル化されることで、過去のデータと比較しやすくなり、保全の精度も向上します。
インフラ点検ロボットの中には、カメラやセンサーを搭載し、ひび割れ・腐食などの異常を記録・分析するものもあります。具体的な種類と活用方法について、次の章で詳しく解説していきます。
インフラ点検ロボットの種類と活用方法

ここからは、点検ロボットの種類と活用方法について詳しく解説していきます。
▼インフラ点検ロボットの種類と活用方法
- 種類①|地上走行型ロボット
- 種類②|設置型カメラ(LiLzの完全無線型カメラなど)
- 種類③|狭所・配管内移動型ロボット(移動型・ヘビ型ロボットなど)
- 種類④|空中移動型(ドローン)
- 種類⑤|水中移動型
種類①|地上走行型ロボット
地上走行型ロボットは、道路や床面などの地表を移動しながらインフラ設備の異常を点検するロボットです。主にタイヤやクローラーを使って自走し、搭載されたカメラやセンサーでひび割れや腐食などの状態を確認・記録します。
橋梁やトンネル、舗装道路など広範囲にわたる構造物の巡視点検に活用されており「巡視点検ロボット」と呼ばれることもあります。
地上走行型ロボットを活用するメリットは、人が歩いて点検していたエリアを自動化・省力化できる点です。障害物の回避やGPSによる位置情報の記録機能を備えたモデルも多く、点検結果のデジタル管理や異常箇所のマッピングにも対応可能です。
また、点検精度のばらつきが少なく、熟練者でなくても一定の品質で運用できる点も魅力と言えます。
種類②|設置型カメラ(LiLzの完全無線型カメラなど)
設置型カメラは、橋梁やトンネル、構造物の内部などに固定または仮設し、定点で撮影・記録する点検機器です。移動型のロボットとは異なり、一定の位置から広範囲を継続的に監視できることが特徴です。
高解像度カメラに加えて、ズーム機能や赤外線センサーを備えた機種も多く、暗所や遠距離でも劣化箇所を捉えられます。
代表的な製品は、「橋梁点検用カメラ(例えばLiLzの完全無線型カメラなど)」です。橋の側面や下面など、人が直接近づきにくい部分でもカメラを設置でき、細かなひび割れや腐食を高精度で撮影します。
狭い空間に吊り下げたり、鉄骨部分に磁石で固定したりと、柔軟な設置が可能です。足場を組まずに高所や橋梁下面を点検できるため、作業負担や工期を大幅に削減できます。
種類③|狭所・配管点検用ロボット(移動型・ヘビ型ロボットなど)
狭所・配管点検ロボットは、複雑な構造を持つ場所や高所の配管などを点検するロボットです。こちらも足場を設ける必要がなく、狭い配管内部やダクト、煙道といった空間でも安全かつ効率的に点検を進められます。
主にクローラー型や多関節型など可動性の高い構造を採用し、超音波やX線センサで配管の劣化や肉厚を測定できます。簡単な組み立て作業だけで、その日のうちに点検を開始できる点も特徴のひとつです。
代表例としては、hibot社の「Float Arm」が挙げられます。Float Armは軽量かつ高可動域を持つ多関節型ロボットで、以下のような機器を先端に装着可能です。
- 高解像度の検査カメラ
- 複数のナビゲーションカメラ
- 超音波センサ
- X線透過センサ
- サーモカメラ
- 3Dレーザースキャナー
このような機器で、狭所内部の状況を正確に可視化できます。
狭所・配管内移動型ロボットの活用は、危険性とコストの高い手作業を代替し、省人化・効率化を実現する有力な手段です。
種類④|空中移動型(ドローン)
空中移動型ロボットは、主にドローンを活用して、インフラ構造物を上空から点検するロボットです。近年では高性能カメラや赤外線センサー、3Dスキャン機能などを搭載した産業用ドローンが多く開発されています。
橋梁やダム、鉄塔、高層ビルなどの高所や広範囲におよぶ構造物の外観調査に活用可能です。
空中からの撮影により、足場の設置や高所作業せずに点検できるため、作業員の安全性が大幅に向上します。また、広範囲を短時間でカバーできるため、調査の効率化にも貢献します。
特に、ダムや水門の外壁や、風力発電設備など、人が立ち入りにくい場所の初期診断や経年劣化の把握に有効です。
種類⑤|水中移動型
水中移動型ロボットは、ダムや河川、港湾施設、貯水槽、下水処理施設など、水中にあるインフラ構造物を点検するロボットです。
主に以下の2タイプがあり、点検対象や環境に応じて使い分けられています。
- ROV(Remotely Operated Vehicle):遠隔操作型
- AUV(Autonomous Underwater Vehicle):自律型
ROVは、人間の操縦によってリアルタイムで動かす水中ロボットです。一方、AUVはあらかじめ設定されたルートに従って自動で移動し、周囲の状況を撮影・記録するタイプのロボットです。
どちらも、水深のある場所や人が潜れない危険区域で使用され、カメラやソナーを活用して構造物の劣化状況を調査できます。
注目のインフラ点検ロボットメーカー5社

ここでは、注目のインフラ点検ロボットメーカー5社を紹介します。それぞれの強みや特徴を比較し、導入検討の参考にしてください。
| インフラ点検ロボットメーカー | 特徴 |
|---|---|
| 株式会社ハイボット | ・東京工業大学発のベンチャー企業 ・福島第一原発の廃炉経験から生まれた多関節型ロボット「Float Arm」を開発 |
| 株式会社日立産業制御ソリューションズ | ・産業やインフラ向けの制御システムを手がける日立グループのIT企業 ・「橋梁点検ロボットカメラ」を提供(※2024年12月31日で販売終了) |
| 株式会社正興電機製作所 | ・点検や配膳などに使われるロボットを提供するメーカー ・3Dレーザーナビで自律移動できる多機能な巡視点検ロボット「SP02」を提供 |
| 株式会社Piezo Sonic | ・自律移動ロボットやスマート機器を開発する技術系企業 ・搬送用自律移動ロボット「Mighty-D」を提供 |
| 協栄産業株式会社 | ・電子部品の販売から開発・製造・システム構築まで手がける技術系の商社 ・点検業務の効率化を支援する「インフラ点検ロボットシステム」を提供 |
おすすめ①|株式会社ハイボット
引用元:株式会社ハイボット
| 会社名 | 株式会社ハイボット |
| 住所 | 東京都品川区北品川5-9-15 渡辺コーポレーションビル4階 |
| 特徴 | ・東京工業大学発のベンチャー企業 ・Float Armは、福島第一原発の廃炉経験から生まれた多関節型ロボット |
| 特設ページ | https://lilz-nbk.co.jp/products/hibot/ |
株式会社ハイボットは、東京工業大学発のベンチャー企業で、ロボット技術を活用して、安全で持続可能な社会の実現を目指しています。
hibot社が開発した「Float Arm」は福島第一原子力発電所の廃炉作業の経験をもとに開発された、遠隔操作アームロボットシステムです。Float Armを活用すると、人が入れないような狭い場所でも、安全に点検できます。
配管内部の目視確認はもちろん、肉厚の測定、温度の確認、3次元での形状把握といった高度な点検もこなします。
過酷な現場での作業をロボットに代替したい方や安全性と効率性を両立させたい方は、以下のURLから詳細をご確認ください。
おすすめ②|株式会社日立産業制御ソリューションズ

| 会社名 | 株式会社日立産業制御ソリューションズ |
| 住所 | 東京都台東区秋葉原6番1号(秋葉原大栄ビル) |
| 特徴 | ・産業やインフラ向けの制御システムを手がける日立グループのIT企業 ・「橋梁点検ロボットカメラ」を提供(※2024年12月31日販売終了) |
| URL | https://www.hitachi-ics.co.jp |
株式会社日立産業制御ソリューションズは、管理・制御システムの構築に長年取り組んできた、実績ある企業です。現場での作業ノウハウを豊富に蓄積しており、デジタル技術の活用にも力を入れています。
その代表的な取り組みの一つが「橋梁点検ロボットカメラ」です。届きにくい場所をカメラ付きポールとタブレットで安全・効率的に点検し、作業者の安全確保や作業時間の短縮に貢献します。
なお、「橋梁点検ロボットカメラ」は2024年12月31日で販売を終了しております。
おすすめ③|株式会社正興電機製作所

引用元:株式会社正興電機製作所
| 会社名 | 株式会社正興電機製作所 |
| 住所 | 福岡市博多区東光2丁目7番25号 |
| 特徴 | ・点検や配膳などに使われるロボットを提供するメーカー ・3Dレーザーナビで自律移動できる多機能な巡視点検ロボット「SP02」を提供 |
| URL | https://www.seiko-denki.co.jp |
株式会社正興電機製作所は、創業から100年を超える歴史のある企業です。ロボットに限らず、電子機器や公共インフラ向け製品など、幅広い分野で技術開発をしています。
株式会社正興電機製作所が提供する「巡視点検ロボット SP02」は3Dレーザーナビゲーションシステムを搭載した多機能巡視点検ロボットです。天候に左右されずさまざまな環境に対応し、点検レポートまで作成できます。
インフラ現場の省力化と高精度化を同時に実現する、実用性の高いロボットとして注目されています。
おすすめ④|株式会社Piezo Sonic

引用元:株式会社Piezo Sonic
| 会社名 | 株式会社Piezo Sonic |
| 住所 | 東京都世田谷区粕谷1-15-5 |
| 特徴 | ・自律移動ロボットやスマート機器を開発する技術系企業 ・搬送用自律移動ロボット「Mighty-D」を提供 |
| URL | https://www.piezo-sonic.com |
株式会社Piezo Sonicは、搬送用自律移動ロボットの開発・製造・販売を手がける企業です。超音波モニターを開発・製造する国内で数少ないメーカーとして注目されています。
同社が提供する搬送用自律移動ロボット「Mighty-D」は日本の月面探査ロボットの技術を応用しています。施設内での搬送や農業支援にも活用されているのが特徴です。
悪路や傾斜地でも安定して走行できる走破性能が評価され、さまざまな現場で導入が進んでいます。
おすすめ⑤|協栄産業株式会社

引用元:協栄産業株式会社
| 会社名 | 協栄産業株式会社 |
| 住所 | 東京都品川区東品川4-12-6 品川シーサイドキャナルタワー |
| 特徴 | ・電子部品の販売から開発・製造・システム構築まで手がける技術系の商社 ・点検業務の効率化を支援する「インフラ点検ロボットシステム」を提供 |
| URL | https://www.kyoei.co.jp |
協栄産業株式会社は、エレクトロニクス分野を中心に、部品や産業用機器を提供する企業です。単なる技術商社ではなく、製品の開発・製造・ソフトウェア開発・システム構築といった多様な機能も併せ持っています。
協栄産業株式会社の「インフラ点検システム」は、トピー工業のロボット「エニーライト」とタブレットツールを組み合わせたものです。「エニーライト」は世界最小クラスの大きさで、床下や配管、危険区域を安全に隅々まで点検できます。
撮影した映像をもとに、その場で簡単に点検レポートを作成できる点も便利です。
インフラ点検ロボットの課題

最後に、インフラ点検ロボット導入時の課題について整理します。
▼インフラ点検ロボットの課題
- 課題①|点検作業の全てをロボットに任せられない
- 課題②|導入コストがかかる
- 課題③|メンテナンス費用が発生する
- 課題④|操作できる人が少ない
- 課題⑤|トラブル発生時の責任の所在が不明
課題①|点検作業の全てをロボットに任せられない
インフラ点検ロボットは多くの場面で活用が進んでいるものの、点検業務の全てを任せられるわけではありません。あくまでロボットは人の作業を補助する存在であり、最終的な判断には人の目が必要です。
また、ロボットの形状や性能によっては入り込めない箇所も存在します。「国立研究開発法人 土木研究所」によると、以下の箇所はロボット点検が困難とされています。
- 構造部材が密集する狭い部分
- 上弦材の下面、下弦材の上面
- 橋台、端横桁に囲まれた狭隘部
- 内桁の下フランジ上面(構造の内側にある主桁)
しかし、一部のインフラ点検ロボットの中には上記のような場所でも、点検可能なものもあるため、点検対象に合わせて適切なロボットを選定しましょう。
課題②|導入コストがかかる
インフラ点検ロボットの導入には高額な初期費用がかかるため、多くの企業にとって導入のハードルになっています。機種によっては200万〜300万円以上の初期投資が必要となり、安易に導入できる価格帯ではありません。
例えば、大和ハウス工業株式会社の狭小空間点検ロボット「moogle evo(モーグル エヴォ)」は、税抜き価格で280万円(5年保証付き)です。特に中小規模の事業者にとっては、コストに見合う効果が明確でなければ導入に踏み切りにくい状況です。
そのため、費用対効果を見極めた上で、必要な性能や用途に見合った機種を選定しましょう。
課題③|メンテナンス費用が発生する
インフラ点検ロボットは導入コストだけではなく、維持費も発生します。定期点検や部品交換、ソフトウェアの更新などを含めた保守費用が必要となり、一回の点検で数十万円かかるケースもあります。
メンテナンスを怠ると故障や事故のリスクが高まるため、疎かにはできません。また、
労働安全衛生法第28条第1項の規定により、安全確保のための定期点検が推奨されています。
インフラ点検ロボットの導入時には、初期投資だけでなく保守・運用にかかる継続コストも含めて総合的に検討すべきです。限られた予算の中で無理に導入を進めると、運用が立ち行かなくなるリスクがあります。
課題④|操作できる人が少ない
インフラ点検ロボットは精密かつ高度な操作が求められるため、扱える人材が限られています。
現場ごとに使用方法や設定が異なる場合が多く、簡単なマニュアル操作だけでは対応できないケースもあります。また、点検対象や作業環境によっては専門的な知識や技術が必要となり、現場ごとのカスタマイズや訓練が不可欠です。
しかし、人材不足の中で、こうしたスキルを持つ技術者を確保すること自体が困難になっています。インフラ点検ロボットを導入しても、十分に活用できないリスクもあるため、操作教育の整備や外部支援の活用が必要です。
課題⑤|トラブル発生時の責任の所在が不明
インフラ点検ロボットの高機能化が進むにつれ、故障や誤作動が発生した際の責任分担が曖昧になりがちです。
例えば、点検結果に誤りがあった場合、ロボットの不具合か操作者のミスかを特定するのは難しいケースがあります。このような状況では、ロボットメーカー・導入企業・委託先業者の間で責任の所在をめぐるトラブルが起こりやすくなります。
そのため、契約段階で各社の責任範囲を明確にしておくことが不可欠です。
また、製品サポートや保証内容が不明確な場合もあるため、万が一の対応に不安を感じる導入者も少なくありません。このような不透明さが、インフラ点検ロボット導入の心理的なハードルとなっているのが現状です。

インフラ点検ロボットの導入を考えている方は、NBKマーケティングまでご相談ください。
NBKマーケティングでは、hibot社の多関節型点検ロボット「Float Arm(フロートアーム)」を活用したサービスを提供しています。人が立ち入るのが難しい場所でも、精度の高い検査を可能にし、作業コストと工期の大幅な削減が見込めます。
点検の自動化に関心のある方は、下記から詳細をご確認ください。
まとめ
インフラ点検ロボットは、老朽化が進む社会インフラの保守を支える重要な手段として注目されています。高所・狭所・水中など、従来の人手では困難だった環境でも、安全かつ高精度な点検を可能にします。
ぜひ、本記事の内容を参考に、貴社の現場に適したインフラ点検ロボットを選定してください。
NBKマーケティングでは、狭小空間の点検に適したhibot社の多関節型ロボット「Float Arm」を提供中です。導入をご検討の方は、ぜひお気軽にご相談ください。